How to Select and Apply a Gearmotor
When you choose a Bodine gearmotor, motor or control you get more than just the nameplate ratings. You get peace of mind. Whether you are designing a new machine or simply upgrading existing machinery, you can count on our team to make sure you have a motion control solution that will be reliable, efficient, and trouble-free for years to come. We design our rugged, high-performance gearmotors for equipment where downtime is not an option.
Bodine offers over 1,400 standard/stock products with gear ratios from 4:1 to 3600:1, torque to 1500 lb‑in (170Nm) and horsepower up to ¾ hp (560W), all available from our centrally-located manufacturing facility in Peosta, Iowa. If none of our stock products fit your needs, let our engineers help you create a custom solution that precisely matches your design specifications.
What is a Gearmotor?
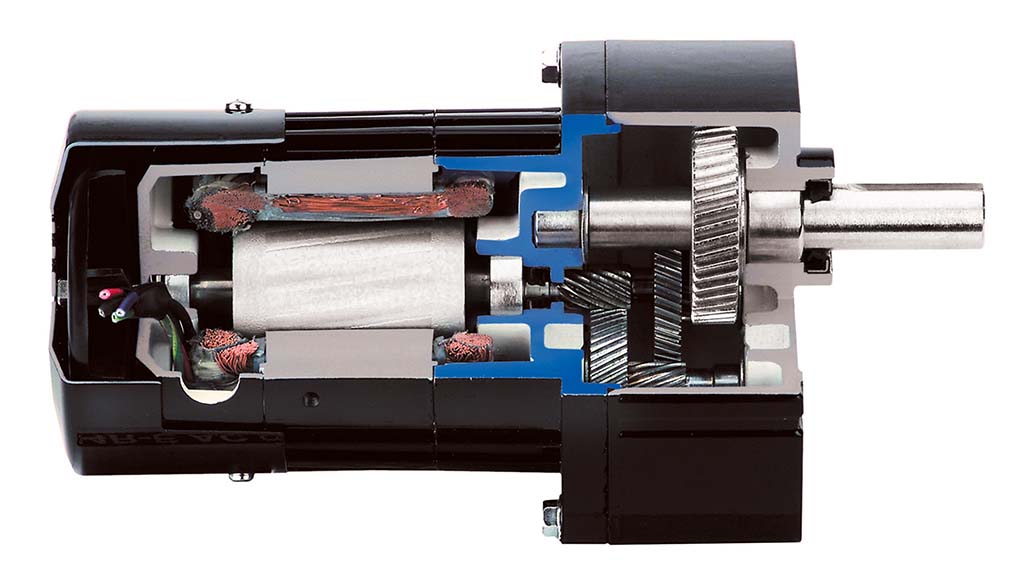
A gearmotor (or geared motor) is a small electric motor (AC induction, permanent magnet DC, or brushless DC) designed with an integral (non-separable) gear reducer (gearhead) attached.
For more information, read this article.
Gearmotor Benefits
- Gearmotors eliminate the need for motor/gearhead couplings and eliminate any potential bearing alignment problems.
- Quieter operation and “near perfect” alignment of the rotor, pinion and geartrain.
- Using the right sized motor and gearhead combination for an application helps to prolong gearmotor life and allows for optimum power management and power utilization.
- Minimum risk of lubricant leakage, because of “O-ring” and lip seal construction.
Selecting the Right Gearmotor
Consider these basic design criteria to determine which gearmotor is right for your application.
![]() Intermittent vs. Continuous Duty. If the gearmotor will operate for only a few minutes or hours per day, consider the peak torque rating, and select the smallest gearmotor available. It will require less mounting space, and likely will be the most cost-effective solution. If the application requires a gearmotor for continuous duty operation, then choose one with a torque rating that is higher than the expected application torque.
Intermittent vs. Continuous Duty. If the gearmotor will operate for only a few minutes or hours per day, consider the peak torque rating, and select the smallest gearmotor available. It will require less mounting space, and likely will be the most cost-effective solution. If the application requires a gearmotor for continuous duty operation, then choose one with a torque rating that is higher than the expected application torque.
![]() Speed and Torque. Once the duty cycle of the application has been determined, the two most important specs are desired speed and torque. Gearboxes reduce motor speed and multiply torque. When choosing a gearmotor for a specific application, consider the rated (max) speed and available torque that are listed on the gearbox’s nameplate.
Speed and Torque. Once the duty cycle of the application has been determined, the two most important specs are desired speed and torque. Gearboxes reduce motor speed and multiply torque. When choosing a gearmotor for a specific application, consider the rated (max) speed and available torque that are listed on the gearbox’s nameplate.
![]() Gearhead Life. Gearhead life depends on output torque, start/stop frequency, shock loads, operating speed, actual load and operating temperature. Talk to one of our application engineers about design life estimates.
Gearhead Life. Gearhead life depends on output torque, start/stop frequency, shock loads, operating speed, actual load and operating temperature. Talk to one of our application engineers about design life estimates.
![]() Output Torque. If your required torque exceeds the rated torque of the gearmotor, it can negatively affect the design life (see sidebar). While our integral gearmotors are designed for optimum performance at rated speed and torque, some manufacturers mate stand-alone motors and separable gear reducers, each with their own nameplate ratings. Motor/gearhead mismatch can greatly limit the gearmotor’s life.
Output Torque. If your required torque exceeds the rated torque of the gearmotor, it can negatively affect the design life (see sidebar). While our integral gearmotors are designed for optimum performance at rated speed and torque, some manufacturers mate stand-alone motors and separable gear reducers, each with their own nameplate ratings. Motor/gearhead mismatch can greatly limit the gearmotor’s life.
![]() Brush Life. Brush maintenance is only a concern with PMDC, universal or series wound DC motors. Brush life is dependent on variables such as motor speed and the form factor of the DC voltage.
Brush Life. Brush maintenance is only a concern with PMDC, universal or series wound DC motors. Brush life is dependent on variables such as motor speed and the form factor of the DC voltage.
![]() Ambient Temperature. The winding temperature plus the ambient temperature must be lower than the insulation class temperature limit. If there is no ambient temperature rating given on the nameplate, then ask the manufacturer. As a general rule, both lubricant and insulation life are cut in half for every 10°C increase in operating temperature above rated temperature.
Ambient Temperature. The winding temperature plus the ambient temperature must be lower than the insulation class temperature limit. If there is no ambient temperature rating given on the nameplate, then ask the manufacturer. As a general rule, both lubricant and insulation life are cut in half for every 10°C increase in operating temperature above rated temperature.
Calculating the Output Torque of a Motor-Reducer Combination
Output Torque = Tm x R x Eff
| Tm | = Motor Torque |
| R | = Ratio |
| Eff | = Efficiency |
| (assume 80% gear efficiency) | |
Example 1
| Reducer: | 100 lb-in, 20:1 ratio |
| Motor: | 10 oz-in @ 1,700 rpm |
| Result: | 10 lb-in output torque |
| The mating of a 100 lb-in, 20:1 gear reducer to a 10 oz-in at 1700 rpm (1/60 HP) motor produces only a 10 lb-in output torque. Therefore, the nameplate rating of the integral gearmotor would be 10 lb-in, even though the gear reducer is capable of transmitting much more. The output torque rating is “motor-limited,” because the reducer is not being fully utilized. | |
Example 2
| Reducer: | 100 lb-in, 20:1 ratio |
| Motor: | 300 oz-in @ 1,700 rpm |
| Result: | 300 lb-in theoretical output torque |
| If the same gear reducer is mated to a motor rated 300 oz‑in at 1,700 rpm (1/2 HP), then the output torque would be 300 lb-in, which is three times the rating of the gear reducer. Therefore, the nameplate rating would be 100 lb‑in, even though the motor is capable of producing much more. This is an example of a “gear-limited” output torque rating, because the motor’s capability is not being fully utilized. | |
Design Considerations for Gearmotor Applications
Now that you selected an (integral) gearmotor that meets your speed, torque, duty cycle and general performance criteria, consider these application specific questions:

![]() Gearmotor Mounting Orientation. Gearmotors are typically designed to be mounted with the gearbox level with the motor, and with the drive shaft in horizontal orientation. Other mounting positions are possible, depending on the type of gearmotor and how its gearbox is lubricated. If you require non-standard mounting (e.g. vertical), the first step in choosing a gearmotor should be to call the manufacturer’s technical support team.
Gearmotor Mounting Orientation. Gearmotors are typically designed to be mounted with the gearbox level with the motor, and with the drive shaft in horizontal orientation. Other mounting positions are possible, depending on the type of gearmotor and how its gearbox is lubricated. If you require non-standard mounting (e.g. vertical), the first step in choosing a gearmotor should be to call the manufacturer’s technical support team.
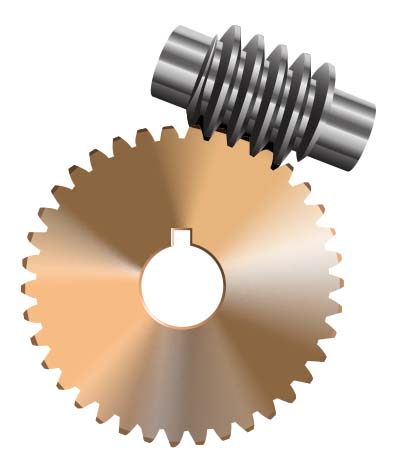
![]() Gearhead Efficiency and Noise. The worm gears found in most right angle gearboxes are generally quieter than the spur or helical gear assemblies used in parallel shaft or planetary gearboxes, but they are less efficient and generate more heat. Right angle gearmotors often require a larger motor to match the output torque of a parallel shaft gearmotor with the same gear ratio, but due to their compact design require less mounting space. Right angle gearmotors with gear ratios above 20:1 are often “self-locking,” meaning they can’t be back-driven. Right-angle gearboxes also can provide holding torque with the motor power turned off. This is desirable in applications where a load is expected to remain stationary even after the power to the gearmotor is turned off. However, this is not recommended as a “fail-safe” application solution because holding torque diminishes as the gears become worn or if shaft vibration occurs.
Gearhead Efficiency and Noise. The worm gears found in most right angle gearboxes are generally quieter than the spur or helical gear assemblies used in parallel shaft or planetary gearboxes, but they are less efficient and generate more heat. Right angle gearmotors often require a larger motor to match the output torque of a parallel shaft gearmotor with the same gear ratio, but due to their compact design require less mounting space. Right angle gearmotors with gear ratios above 20:1 are often “self-locking,” meaning they can’t be back-driven. Right-angle gearboxes also can provide holding torque with the motor power turned off. This is desirable in applications where a load is expected to remain stationary even after the power to the gearmotor is turned off. However, this is not recommended as a “fail-safe” application solution because holding torque diminishes as the gears become worn or if shaft vibration occurs.
![]() Gearhead Life. Gearmotor life is affected by many factors. The obvious ones are operating speed, load, duty cycle, and ambient temperature. The higher any of these operating conditions are, the sooner the gearhead components will wear out. But there are also design details inside a gearbox that determine the gearmotor’s life. For example: the sliding action of worm gears is more difficult to lubricate and is less efficient than the rolling action of spur and helical gearing. Therefore, metallic worm and gear teeth will wear faster than metallic spur and helical gear teeth. Oil lubricated gears will last longer than grease lubricated gears because oil provides more consistent lubrication to the gear teeth under load conditions.
Gearhead Life. Gearmotor life is affected by many factors. The obvious ones are operating speed, load, duty cycle, and ambient temperature. The higher any of these operating conditions are, the sooner the gearhead components will wear out. But there are also design details inside a gearbox that determine the gearmotor’s life. For example: the sliding action of worm gears is more difficult to lubricate and is less efficient than the rolling action of spur and helical gearing. Therefore, metallic worm and gear teeth will wear faster than metallic spur and helical gear teeth. Oil lubricated gears will last longer than grease lubricated gears because oil provides more consistent lubrication to the gear teeth under load conditions.
Application Tips
Oil vs. Grease
Oil provides more consistent lubrication to the gear teeth under load conditions. Grease provides greater flexibility in mounting and minimizes the risk of leakage. Despite advantages, oil is not always used in smaller fractional HP gearmotors because of these sealing considerations. If a non‑standard mounting orientation is required, one possible alternative is a semi-fluid grease. Avoid mounting an oil-filled gearbox directly above the motor. If the drive shaft must point upward, then a grease-lubricated, right angle gearmotor would be a better solution.
When to Use Holding Brakes
In applications where a load has to be held securely during a power-off condition, an external holding brake should be added to the motor or gearmotor. The brake is typically installed on the high-speed or accessory shaft (armature or rotor shaft) and not on the drive shaft (output shaft).
Signs of Bearing Wear
Some early warning signs for bearing problems can be an increase in temperature differential between the motor and the bearings, an increase in bearing noise, or an increase in torque (load) of the motor, resulting in an increased current draw by the motor/gearmotor.
Fractional HP Gearmotors - Types and Benefits

Variable and Fixed Speed AC
Highly Efficient, Long Lasting Performance
- No maintenance required
- Inverter duty, 3-phase models are available with either 230V or 230/460 VAC windings

Permanent Magnet DC
Variable Speed, Easy to Install
- High starting torque and predictable linear speed torque performance
- Easy control set-up

Brushless DC (EC) and INTEGRAmotors
Quiet Running, Zero Maintenance
- 24 or 130VDC windings
- INTEGRAmotors feature a low-voltage brushless DC speed control, motor and encoder in one compact package.

Hollow Shaft Gearmotors
Eliminate Sprockets, Couplings and Drive Chains
- Versatile mounting options in tight spaces
- Easier to mount and maintain than regular right-angle gearmotors
- Available in AC, PMDC or BLDC configurations
Commonly Used Calculations
Gearmotor Torque
Gearmotor torque (output) when motor torque is known
| T [lb-in] | = | (Tm - SF) [oz-in] | x | R x Eff |
| 16 |
| Tm | = Motor Torque |
| SF | = Seal Friction |
| R | = Ratio |
| Eff | = Efficiency |
Motor HP Formula
Motor horsepower for a given torque and speed
| HP | = | Tm (oz-in) x N (RPM) |
| 63025 x 16 |
| N | = Motor Speed |
Motor Torque Formula
Motor torque for a given horsepower rating
| Tm [oz-in] | = | HP x 63025 x 16 |
| N (RPM) |
| HP | = Motor Power |
AC Motor Speed Calculation
| Speed [RPM] |
= | 120 x Hz | (-Slip)* |
| Number of Poles |
| * | Slip only applies to non-synchronous AC Motors |
Common Conversions
| 1 HP | = 746 Watts |
| 1 lb-in | = 16 oz-in |
| l lb | = 0.454 Kg |
| 1 lb-in | = 0.113 Nm |
Gearmotor Application Examples
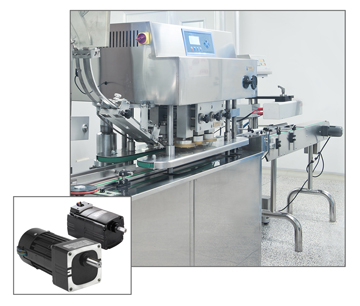
Automated Polybag Sealer
Packaging Equipment
The manufacturer of an automated bag sealer required that two conveyors within the same machine operate at synchronous speeds. By powering both gearmotors...

Automated Guided Vehicles
Warehousing & Logistics
An original equipment manufacturer (OEM) of AGVs contacted us to help develop two new custom gearmotors for their latest design. The solutions were two...
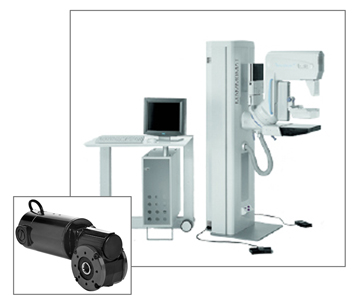
Mammography Machine
Medical Equipment
To increase patient comfort, a medical equipment manufacturer required extremely smooth and quiet operation of the gearmotors in their equipment...
